Il Laboratorio di Neuroingegneria Riabilitativa è stato istituito nell’ambito del Gruppo di Studio di Ingegneria e Tecnologie Biomediche nell’anno 2001. La missione del laboratorio è quella di sviluppare dispositivi innovativi per il trattamento e la promozione dell’autonomia funzionale dei pazienti che afferiscono alle unità di Neurologia Riabilitativa e di Recupero e Rieducazione Funzionale dell’Istituto di Veruno. I dispositivi sviluppati vengono proposti a supporto ed integrazione dell’attività del terapista che quindi li utilizza come uno strumento in grado di potenziare la sua attività nell’ambito del piano di trattamento individuale. Grazie all’impiego di queste tecnologie è possibile migliorare la prestazione motoria alla dimissione, abbreviare i tempi necessari per la riabilitazione e fornire parametri oggettivi per la valutazione del paziente.
Il laboratorio lavora in stretta collaborazione con università, centri di ricerca e aziende esterne che operano nel settore della robotica, della realtà virtuale e delle interfacce uomo-macchina.
Nuove Tecnologie per la Riabilitazione e l’Autonomia Funzionale
Scopo di questo tema di ricerca è quello di sviluppare dispositivi innovativi per il trattamento clinico e la promozione dell’autonomia funzionale dei pazienti con deficit motori. In particolare vengono sviluppate ed applicate tecnologie robotiche e di realtà virtuale per il trattamento riabilitativo di pazienti con gravi cerebrolesioni acquisite, quali ictus e traumi cranici. Grazie all’applicazione di queste tecnologie è possibile studiare i meccanismi di apprendimento motorio e di plasticità neurale che sono responsabili del miglioramento della funzione motoria in seguito al trattamento riabilitativo. Un altro ambito di ricerca è rappresentato dallo studio delle diverse modalità di somministrazione dei compiti motori, di interazione con il paziente e di diversificazione delle esperienze sensoriali-motorie proposte. Questi sistemi consentono di fornire un intervento terapeutico mirato e modulato sulle reali capacità del paziente grazie alla somministrazione di esercizi orientati al compito motorio, alla volontarietà e alla ripetitività del movimento. Inoltre, in collaborazione con le unità cliniche dell’Istituto i risultati delle ricerche vengono sfruttati per lo sviluppo e l’aggiornamento di nuovi protocolli terapeutici.
Principali Obiettivi di Ricerca raggiunti
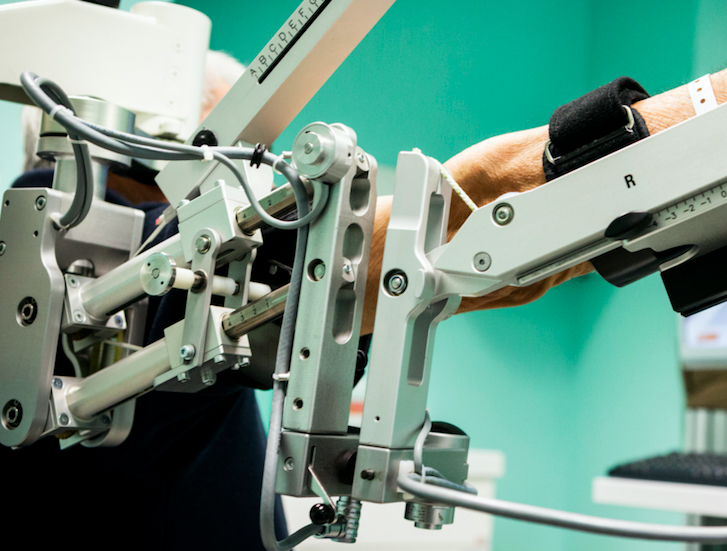
Applicazione di un dispositivi robotizzato per la riabilitazione dell’arto superiore della mano.
Messa a punto di un sistema di valutazione per l’analisi del movimento dell’arto superiore.
Studio del recupero motorio mediante parametri cinematici e cinetici misurati dal robot.
Sviluppo di un algoritmo per l’ottimizzazione dell’esercizio sulla base della prestazione motoria.
Valutazione del senso di posizione dell’arto superiore.
Sviluppo di protocolli di trattamento per pazienti con deficit sensitivi.
Partecipazione a Progetti Finanziati
Progetti di Ricerca in corso e in programmazione
Studio del controllo della forza durante riabilitazione robotizzata.
Valutazione quantitativa dei deficit propriocettivi.
Valutazione Quantitativa della Spasticità
Questo tema è dedicato allo studio della rigidità muscolare e dell’ipertono per la valutazione quantitativa della spasticità. In particolare vengono valutati i diversi contributi dovuti alle caratteristiche intrinseche dell’articolazione sottoposta a valutazione, ed ai riflessi evocati sulle risposte elettromiografiche ottenute in seguito a stiramento del muscolo a velocità costante.
Principali Obiettivi di Ricerca raggiunti
· Sviluppo di un sistema per la misura della spasticità nell’articolazione del polso.
· Valutazione degli indici di rigidità intrinseca e riflessa.
Collaborazioni Scientifiche
· ARTSLAB Scuola Superiore Sant’Anna - Pisa.
· Fondazione Istituto Italiano di Tecnologia - Genova.
· Dipartimento di Informatica, Bioingegneria, Robotica e Ingegneria dei Sistemi (DIBRIS) - Università di Genova.
L’attività educazionale del laboratorio ha lo scopo di diffondere l’attività svolta, i risultati della ricerca ed in generale la cultura relativa alle tematiche trattate attraverso la comunicazione nell’ambito di corsi e convegni sia a livello nazionale che a livello internazionale.
Il Laboratorio accoglie tesisti e specializzandi di varie università italiane.
Balasubramanian S, Colombo R, Sterpi I, Sanguineti V, Burdet E. Robotic assessment of upper limb motor function after stroke. Am J Phys Med Rehabil, 2012 Nov; 91 (11 Suppl 3): S255-69.
Colombo R, Sterpi I, Mazzone A, Delconte C, Pisano F. Taking a lesson from patients’ recovery strategies to optimize training during robot-aided rehabilitation. IEEE Trans Neural Syst Rehabil Eng, 2012 May; 20 (3): 276-85.
Panarese A, Colombo R, Sterpi I, Pisano F, Micera S. Tracking motor improvement at the subtask level during robot-aided neurorehabilitation of stroke patients. Neurorehabil Neural Repair, 2012 Sep; 26 (7): 822-33.
Squeri V, Sterpi I, Basteris A, Casadio M, Pisano F, Colombo R, Sanguineti V. Robot therapy for severely impaired stroke survivors - toward a concurrent regulation of task difficulty and degree of assistance. Proceedings of the Fourth IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics Roma, Italy. June 24-27, 2012; pp 1026-1031.